I recently purchased a Wahoo Headwind as part of my static trainer setup. The device lacks a button remote in favour of App based control. Whilst this works okay in principle, anyone that has used a static trainer knows that in the sweaty heat of the moment trying to use a App is frustrating at best!
Continue reading
Minnow is a tool for using DAM (Debug Accessory Mode), providing an interface to SWD or JTAG and/or UART from the device. It expands upon this concept to include a USB-UART and some utility for use within test rigs. It could be considered SWD over DAM with a sprinkling of USB cereal - unlike usb-cereal it does not use the Chromebook UART mapping in favour of maintaining USB-C rotational symmetry.
Continue reading
I recently had to check a CAN node was providing a cyclic message within a 10% threshold of the defined period. Logging the messages, it appeared that it was slipping by as much as 25% at times.
Continue reading
cyme is a Rust CLI tool I developed for listing system USB buses and devices - a modern cross-platform alternative to lsusb. Here is the README intro:
Continue reading
It’s been six years since my Nixie Pipe project - my interpretation of a modern day Nixie Tube. Whilst the project was successful and has merit as an Nixie Tube alternative, an element of the inspiration was perhaps shying away from the electronic design challenge of a real Nixie Tube project.
Continue reading
My latest clock project has been the longest and most challenging to complete. There have been times when I’ve been tempted to can it or thought I’d reached a dead-end but persevered. I had to keep reminding myself that I do these projects primarily for the challenge, to learn new things and to further my knowledge: if it were simple I wouldn’t have started.
Continue reading
I’ve migrated this blog from Wordpress to Jekyll. Wordpress worked but since I write everything in Markdown before posting it, Jekyll fits into my workflow better. Wordpress become overkill and slow or my needs; it’s not really designed for power users and I didn’t use most the features. In addition, Wordpress required plug-ins like Jetpack in order to prevent an overwhelming amount of SPAM and I didn’t like having an external analytics tool harvesting data . I’m a proponent of just not having tracking cookies rather than cookie banners that everyone hates - it’s an easy and intended solution.
Continue reading
Entrée - like a Canapé but tastier…yes the logo is, and name was, Canapé but I didn’t want to face a Trademark dispute over an acute e for a hobby project…
Continue reading
With the passing of John Conway, I decided to add ‘Game of Life’ to a Flip-Dot project I’m working on, in honour of his work.
Continue reading
I was having random – or not so random – internet dropouts on a 4G WiFi router. I wanted to ascertain when they occur and if it’s internal wireless or WAN to troubleshoot. smokeping is an old but useful tool to capture this as it sits in the background constantly pinging pre-defined servers.
Continue reading
Having used my clever serial terminal – the WT-220 – for a few years now, I’d identified improvements I wanted to make. I was never that pleased with the cobbled together electronics (based on what I had laying around and ability at the time) and with PCB fabrication accessible to hobbyists now thanks to China, I decided the main win would be a Raspberry Pi Hat.
Continue reading
In attempt to get started with FPGAs and Verilog, I decided to port Wooden Bits to a Lattice IceStick – selected because of the Open-Source IceStorm toolchain. Counters and flip-flops are the first thing one learns when starting with FPGA design, so the project lends itself naturally. I learnt things FPGAs are good at and things they are not so good at – best done on a microcontroller. As the project was educational, there were many learnings along the way and invariably still to be learnt; it is not intended as a best use of FPGAs or implementation.
Continue reading
Being part of a generation that doesn’t watch TV…except documentaries and films…and YouTube…ah well, might as well watch it on a big screen. Got a TV, a Samsung Frame – designed to look like a picture frame.
Continue reading
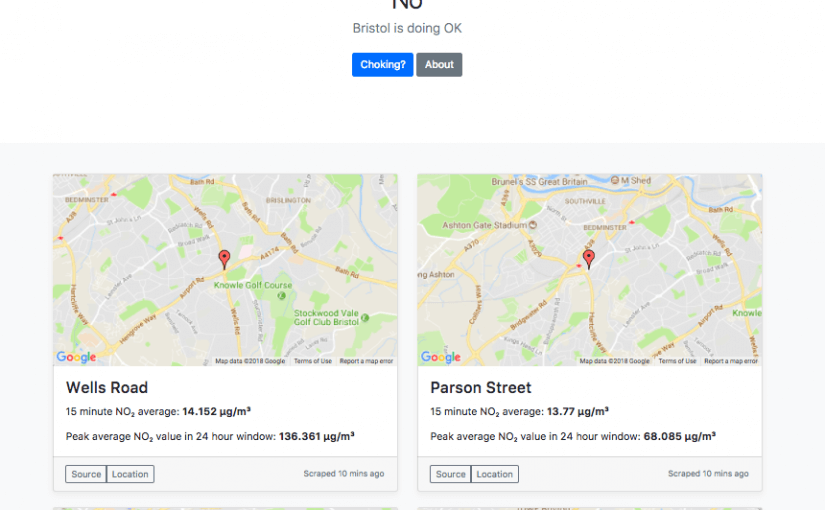
UPDATE: I have not renewed the domains for this so it’s now down
Continue reading