Entrée USB-C CAN Bus Interface with USB-PD
Entrée - like a Canapé but tastier…yes the logo is, and name was, Canapé but I didn’t want to face a Trademark dispute over an acute e for a hobby project…
The Entrée is a USB-C CAN interface. It is a variant of the open source candleLight platform and its many spawns. Not only does it add USB-C, it brings new features and CAN/USB controlled USB-PD for powering devices under test.
This post is a copy and paste of the README.md - the repository one should be used as the source of truth. I thought I’d share it here for the record, as it is both a useful and interesting project.


Features
- Compatiable with:
- gs_usb firmware candleLight_fw; Linux mainline native support.
- slcan cantact; Linux CAN over USART/CDC.
- USB-C connection for use with modern hardware.
- USB-PD negotiation for powering devices rather than using USB communication interface. Up-to 20 V/1 A can be requested and supplied to a device.
- Switched control of 120 Ω termination resistor.
- Switched control of DFU mode and TagConnect 6-pin ISP for use as a development tool.
- USB-PD profile and device setup using switched internal CAN IDs.
- USART test points for SLCAN without USB.
- Two signal connector choices.
- Small form factor: 55 x 18.5 mm.
- Silkscreen art 🎨!
- Web-DFU firmware update/selector tool.
Purchase
Usage
Hardware Connection
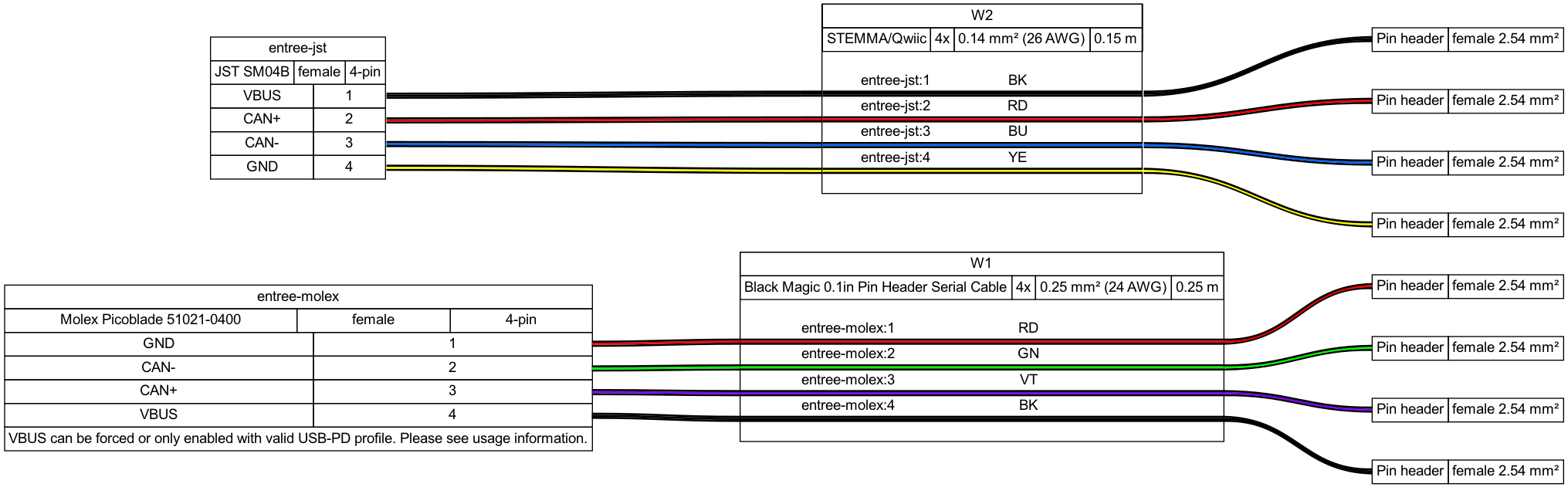
The primary CAN connection is a Molex Picoblade 53261-0471.
The connector was selected because they are commonly used on Drones and so Picoblade to 0.1” header cables can also be easily obtained:
Alternatively, one can obtain pre-crimped female cable assemblies 15134-0402 or female 4-pin housing 51021-04 for custom cabling.
A secondary unfitted JST SM04B (otherwise known as Qwiic/STEMMA) footprint is available on the bottom of the board if one wishes to use those commonly available cables instead. JST pre-crimped part is A04SR04SR30K152A.
Wiring Example
Below is a wiring example showing the Entrée Picoblade and JST pinout. A Black Magic 0.1” female header cable is connected to the Picoblade and standard STEMMA QT connected to the secondary JST header. Note both cable colouring is non-standard due to optimal board layout.
Software
A Vagrant virtual machine environment is provided in the ./linux-vm folder for those on non-Linux hosts or who want a pre-configured environment. Install Vagrant and VirtualBox and then setup the machine from within the ./linux-vm folder with the vagrant up command.
Linux SocketCAN
Entrée comes with candleLight firmware which is intended for use with a Linux host. Most Linux distributions include the gs_usb driver and can kernel modules by default so getting started is very easy.
Create CAN network interface [ref]
sudo ip link set can0 type can bitrate BIT_RATE # where BIT_RATE is the CAN bus speed in b/s
sudo ip link set up can0
CLI
Install can-utils using one’s package manager and then various command line tools are available.
cansend can0 999#DEADBEEF # Send a frame to 0x999 with payload 0xdeadbeef
candump can0 # Show all traffic received by can0
canbusload can0 500000 # Calculate bus loading percentage on can0
cansniffer can0 # Display top-style view of can traffic
cangen can0 -D 11223344DEADBEEF -L 8 # Generate fixed-data CAN messages
See the can-utils README for more.
Cangaroo GUI
The Cangaroo GUI can be compiled for Linux hosts. See Cangaroo.
Windows
To use the default candleLight firmware on Windows, one can use Cangaroo: Pre-compiled Win32 binary.
Alternatively, to use SocketCAN one can use the pre-configured virtual machine explained at the start of the Software section.
Python
The python-can module supports SocketCAN (candleLight), slcan and PCAN devices so options for all hosts are covered - see the configuration page.
Paired with the cantools module, one has access to powerful CLI tools and scripting for CAN bus operations including use with database definition files.
Both modules are pre-installed in the Vagrant virtual machine.
DIP Switches
The 4 bit DIP switch sets unique runtime settings when in the ‘ON’ position; for normal usage as a CAN bus probe these would be ‘OFF’.
| Switch | Decimal | Set Action |
|---|---|---|
| 1 | 1 | Force bootloader for DFU. |
| 2 | 2 | Enable Entrée internal configuration CAN IDs. |
| 3 | 4 | Enable VBUS -> VBS always not just when USB-PD profile valid. |
| 4 | 8 | Enable 120 ohm CAN_H/CAN_L termination resistor |
NOTE both DFU and ‘Enable VBUS’ will require power cycling the device for the change to be reflected.
USB Power Delivery (USB-PD)
The on-board USB-C controller (STUSB4500) is configured for 5 V / 1A power delivery by default (PDO 2). One can configure the controller using the below CAN bus commands when using the candleLight_fw fork and with the internal CAN IDs switch set. Please refer to the candleLight_fw Entrée fork README for usage.
Firmware
- candleLight_fw Entrée fork - [BIN DOWNLOAD]: Default firmware shipping with Entrée. Works with Linux SocketCAN and the Cangaroo GUI. Includes support for configuration of the on-board STUSB4500 USB-C controller and DFU without setting DIP switch.
-
cantact_slcan: slcand is a USART CAN daemon for Linux, which emulates a CAN network socket over USART. The pre-cursor of the candleLight_fw and gs_usb driver, it offers no real advantage since it is still over USB as a CDC. I’ve found it to drop frames at common bus rates and so do not recommend it. USART pins are exposed however if one wishes to play with slcan over physical USART. A virtual network interface can be created:
sudo slcand -o -s8 -t hw -S 3000000 /dev/ttyS0and then used like a SocketCAN interface.
Update
Web Updater
Use the Web-DFU tool provided here: https://www.jbrengineering.co.uk/web-dfu/
Manual CLI
Enable the DFU DIP switch and then issue the following command with dfu-util:
sudo dfu-util -d 0483:df11 -c 1 -i 0 -a 0 -s 0x08000000 -D $FIRMWARE_FILE.bin
Where $FIRMWARE_FILE.bin is the firmware file to be updated. Binaires are stored in the ‘./bin’ folder of this repository, so to flash:
sudo dfu-util -d 0483:df11 -c 1 -i 0 -a 0 -s 0x08000000 -D ./bin/entree_fw.bin # candleLight_fw
Credits
The open source CAN community is large and this project adds to that in the true spirit of open source. The canable devices (of which I have many!) started me on my journey into CAN hardware and software development. Entrée fixes areas I felt could be improved upon and brought up-to date.
Please find links below to projects that have supported the development of the open source CAN ecosystem.
- canable.io
- CANtact
- candleLight
- candleLight_fw
- SocketCAN user space utilities
- Linux slcan module
- Linux gs_usb module
- python-can Python module
Should get you started down the rabbit hole!